Research Projects of Iwasaki Laboratory
Enjoy YouTube video:
Research/Development Activities- Mechatronic Products and Core Motion Control Techniques

[Core Techniques for Motion Control]
High Performance Positioning Methodologies in Mechatronic Products
- Positioning methodology based on robust control in machine tools drive
- Optimal command shaping in machine tools drive
- Positioning methodology based on robust 2DOF control in machine tools drive
- Fast and Precise positioning for table drive systems in machine tools
- Fast and Precise positioning in mechatronic systems
- Control methodology for 3-dimensional earthquake simulator
Precise Modeling Techniques in Mechatronic Systems
- Precise system modeling in frequency domain
- Nonlinear components (friction, hysteresis, stiffness) modeling in micro and macro scales
Applications of Soft Computing/Robust Control Techniques to Mechatronics
- Autotuning of servo controller using GA in machine tools drive
- Adaptive compensation for nonlinear friction of table drive systems in machine tools
- Compensation for nonlinear friction using disturbance observer in machine tools drive
- Vibration suppression control methodologies in various mechatronic systems
- Suppression of machine stand vibration in machine tools drive
- Evolutionary design of 2DOF compensator in mechatronic systems using GA
[Research Projects under Collaboration with Industries]
High-Performance Positioning Methodologies for Information Technologies and Precision Machines
Galvano laser scanners, etc.
(Machine tool/Manufacturing machine companies)
High-Performance Motion Control Methodologies for Table Drive Systems
Electronic parts manufacturing and assembly machines, LCD fabrication machines, Earthquake simulators
(Machine tool/Manufacturing machine companies, etc.)
Control Technologies for Nonlinear Components, Computational Intelligence Applications
Harmonic Drive Gearings, Industrial Robots, Pneumatics and Hydraulic Machines
(Gearing companies, Industrial robot companies, etc.)
[Examples of experimental facilities in laboratory]

Thermostatic Chamber (ca. 20m2) in laboratory
Temp.: 20-30 ±1 ℃, Hum.: 40-70 ±5 %, Cleanliness: class 10,000
Equipments: Harmonic Actuators, Table drive systems, etc.


Industrial Robots (6-axis actual products and prototype) in laboratory
Collaboration with industrial robot companies as well as education programs in undergraduate course
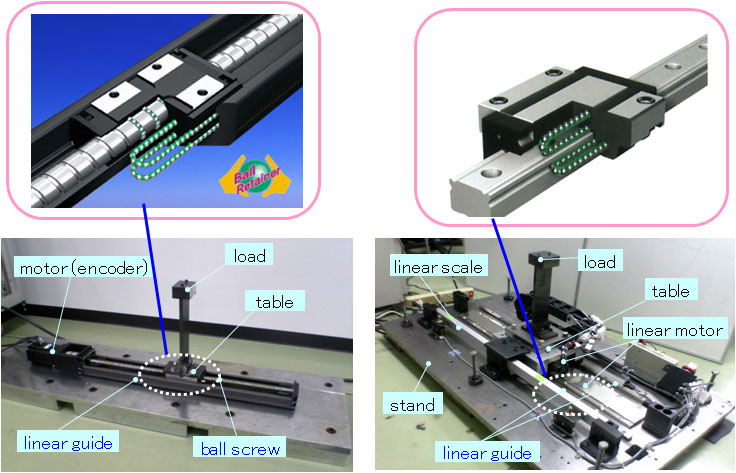
Table drive systems (left: ball screw drive, right: linear motor drive)
Considertaion of rolling friction at ball screw and/or linear guide